交大无人驾驶实战笔记
2019年5月12日 作者:玄月冰灵
阶段:L0~L5
目前L4
传感器:雷达 激光雷达 毫米波雷达 摄像头
内部传感器:眼部跟踪
系统:ROS——机器人操作系统
公司:
Waymo Google旗下
特斯拉 Autopilot
技术:
位置确认 场景理解 路径规划 人机交互 外界交流
数据 半监督学习 效率标记 计算资源 鲁棒性 时间属性
环境感知:
外部:路线、障碍物、行人、车辆、天气
内部:坐姿、头部、视线、心情、负荷
精准定位:
SLAM(同步定位与地图构建)
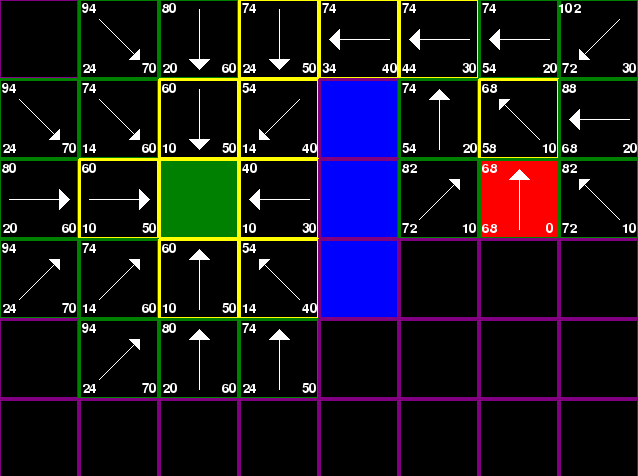
路径规划:
Dijkstra算法 最佳优先搜索 A*算法
线控执行:
制动、转向、油门
神经网络操作:
卷积、池化、激活函数、反向传播
常见数据集:
MNIST ImageNet Places CIFAR-10(0)
冠军模型:
AlexNet GoogleNet VGGNet
CoLab加载Google Drive:
from google.colab import drive
drive.mount(‘gdrive’)
推荐模型:
ImageAI YOLO
优化器:
SGD
激活函数:
softmax